Kinematický pár: pojem, klasifikácia. Guľový kĺb, závesová páčka
Každý komplexný mechanizmus v strojárstve pozostáva zz množiny jednoduchých prvkov. Aby sme pochopili, ako systém funguje ako celok, je potrebné rozobrať prácu každého uzla. A to je predovšetkým pochopenie toho, čo je kinematická dvojica.
Základné pojmy
Ak vezmete dve položky (odkaz), ktorénavzájom sa dotýkajú a keď je tento vzťah mobilný, máme kinematický pár (KP). Jeho charakteristickým rysom je určité obmedzenie pohybu spojov.
Pevný môže mať obmedzenú kapacitupohyb, a potom existuje taká vec ako podmienka komunikácie. Zohľadňuje sa maximálne päť podmienok komunikácie vzhľadom na interakciu prepojení v páre. Preto rozdelenie do tried. Z nich sa odvodilo päť kinematografických párov, z ktorých každá má svoj vlastný stupeň mobility. V triede existuje šesť stupňov mobility. Všetky moderné mechaniky sú založené na aplikácii posledných troch tried kinematík.
Každé telo (odkaz) má svoju vlastnú geometriu. Preto sú prvky zodpovedajúce tejto forme tiež v kontakte. Ukázalo sa, že KP bude schopný vykonať len taký pohyb, ktorý nebude v rozpore s geometriou spojov. Okrem toho, na to, aby sa vzájomne pohybovalo, jeden odkaz musí byť natrvalo fixovaný a druhý v páre je ovplyvnený.
Každý bod v prepojení v čase pohybuprejde cestu (dráha). Táto trajektória môže mať formu krivky umiestnenej v rovine. Keď sú roviny umiestnenia kriviek dráhy spojov v páre paralelné, je to rovný pár. Ak sú krivky pohybu bodov spojov umiestnené v trojrozmernom priestore, kinematický pár je priestorový.
typy
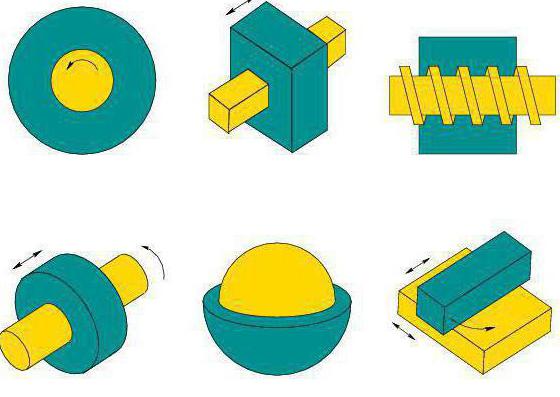
Existujú nasledujúce typy mechanizmov.
Rotačný pár je jediný mobilný systém. Spojky tvoriace takýto pár sú schopné vykonávať iba charakteristickú rotáciu okolo tyče alebo osi. V tomto prípade sa kontakt prvkov uskutočňuje na povrchu valcového tvaru. Taký geometrický systém je uzavretý a patrí k nižším. Mechanizmus-analóg v oblasti vyšších párov je guľôčkové ložisko.
Pár translačných interakcií rovnaké ako predchádzajúce z hľadiskasamostatná mobilita. V takomto systéme môžu odkazy vykonávať len translačný pohyb v priamom smere. Mechanizmus je najnižší pár, uzavretý v geometrických parametroch.
Pár typov interagujúcich fliaš, Tento systém je už dvuhpodvizhnaya, jeho geometria je uzavretá. Je nižší - prepojenia sa môžu otáčať alebo pohybovať v smere dopredu.
Sférický pár je trojmotorový systém. Sloboda takéhoto páru má určitý stupeň, ktorý dovoľuje jeho spojeniam sa otáčať v trojrozmernom priestore a opisujú osi súradníc. Je to aj najnižší geometricky uzavretý mechanizmus.
Pár sférického typu s prstom - dvuhvodvizhny. Pohyb (relatívne nezávislé otáčanie) spojov v tomto páre je obmedzený prstom a drážkou. Dvojica nižšieho poradia je geometricky uzavretá.
Typ skrutky má jediný stupeň slobody mobility. Mechanizmus spodného poriadku je geometricky uzavretý systém, v ktorom sa môže v určitom kroku pohybovať iba znak skrutky. Pohyb v uhlovom a lineárnom smere je striktne individuálny.
Pár rovinového typu, rovinného valca, rovinnej gule. V týchto mechanizmoch sa používa uzáver sil. V prvej triede patrí k nižším, zvyšok k vyšším systémom. V praxi sa takéto kinematické páry odkazov nenašli.
klasifikácia
KP majú nasledujúcu klasifikáciu.
- Podľa druhu komunikácie v mieste kontaktu.
Páry nižšej objednávky sú kontaktované odkazmipovrchy. Sú široko používané v mechaniky, majú jednoduchší dizajn než vyššie dvojice. Štrukturálne sa ich spojenia dotýkajú lietadiel a posúvajú sa pozdĺž nich. Existuje teda rovnomerné rozloženie zaťaženia vo vnútri prvku, ale trenie v mieste spojenia spojov sa zvyšuje. Pozitívnym momentom párov nižších poriadkov je, že je možné prenášať veľké zaťaženia z prepojenia na spoj.
Vyššie kinematografické páry majú kontaktné väzby.na krivke alebo v bodoch. Ich hlavným účelom je znížiť stupeň trenia medzi prvkami spojov počas pohybu. Klasickým príkladom vyšších párov sú ložiská alebo valčeky. Vnútorná konštrukcia týchto prvkov nemá vplyv na pohyb spojov spojených v páre. Na zjednodušenie mechanizmu sa používajú metódy nahradenia vyšších kinematických párov nižšími analógmi.
- Formou relatívneho pohybu, ktorý vytvára spojenie páru.
- Rotary.
- Progresívne.
- Valcový.
- Okrúhly.
- Skrutka.
- Plochá.
Ak sú v mechanizme iba páry, ktoré používajú len prvé štyri typy pohybu, potom sa nazýva páka.
- Podľa typu komunikácie medzi odkazmi.
- V dôsledku pôsobenia sily, ako je tlak pružiny, telesná hmotnosť, stlačený plyn alebo kvapalina, inerciálne sily.
- Kvôli geometrickým prvkom dvojice.
- Podľa stupňa mobility spojov pri pohybe.
- Podľa počtu komunikačných podmienok.
Reverzibilné a nezvratné mechanizmy
Kedykoľvek je to možné, pohyby väzieb v systéme vzhľadom na výber podmienene pevného spojenia sa odlišujú reverzibilným a nezvratným KP.
Ak v mechanizme akéhokoľvek prvku vo voľnomstav zopakuje relatívny pohyb prvku v podmienenom stacionárnom stave, potom sa kinematický pár považuje za reverzibilný (napríklad dvojice s jedným pohybom).
Ak v mechanizme každý prvok vo svojom voľnom stave robí svoj relatívny pohyb odlišný od ostatných, takýto pár je nezvratný.

Typy výstrojov v mechanike
Pod mechanickým prenosom rozumieť mechanickésystém, ktorý premieňa kinematiku a energiu motora na formu prijateľnú pre použitie pracovnými telesami strojov, aby fungovala v danom režime.
Prenosy sú:
- Typ prevodovky. Toto spojenie je postavené na valcových a kužeľových prvkoch. Prvý vysielací pohyb v rovnakej rovine, druhý - v uhle. Prevodovky sú charakterizované kompaktnosťou a schopnosťou prenášať vysoký výkon. Sú veľmi účinné, ale počas prevádzky vytvárajú hluk a vyžadujú mazanie.
- Typ skrutky. Okrem klasickej skrutky patrí do tejto kategórie aj hypoidné a závitovkové prevody. Druhý typ mechanického prevodu sa používa v prípade, keď je potrebné dosiahnuť veľký prevodový pomer. Sú tiež pozoruhodné pre ich bezhluk a plynulosť v práci a schopnosť samo-retardovať. Nevýhody zahŕňajú nízku účinnosť a vysoké opotrebenie.
- Na flexibilných prvkoch. Tu sa pohyb a energia prenášajú v rovnakej rovine kvôli rôznym pásom a reťaziam. Pásové pohony sú jednoduché a dokážu pokryť dlhé vzdialenosti.
- Typ trenia. Vzťahy tohto druhu uplatňujú silu trenia. Používajte ich v mechanizmoch, ktorých prevádzka prebieha v náročných podmienkach.

Typ guľového kĺbu
Hlavným účelom guľového kĺbu jepriečna ťahová tyč sa mohla spojiť pákou s otočným kolesom. Konštrukcia závesu zahŕňa špičku; rukavice, pružina, tlakový uzáver, guľôčkový prst, olivový olej. Pružina stláča na kreštároch guľového kĺbu, ktoré drží prst na sférických plochách. Tento dizajn zaisťuje fungovanie mechanizmu aj vtedy, keď je opotrebovaný.

záves
Smyčky alebo obrubníky - postavené mechanizmyzáklady valcového závesu. Slúžia na otváranie a zatváranie dverí, okien a nábytkových dverí. Konštrukcia slučky obsahuje dve obdĺžnikové pláty (mapy), v ktorých sú vyvŕtané montážne otvory a jadro. Vykonajte závesové závesy najmä z ocele a rôznych zliatin.
záver
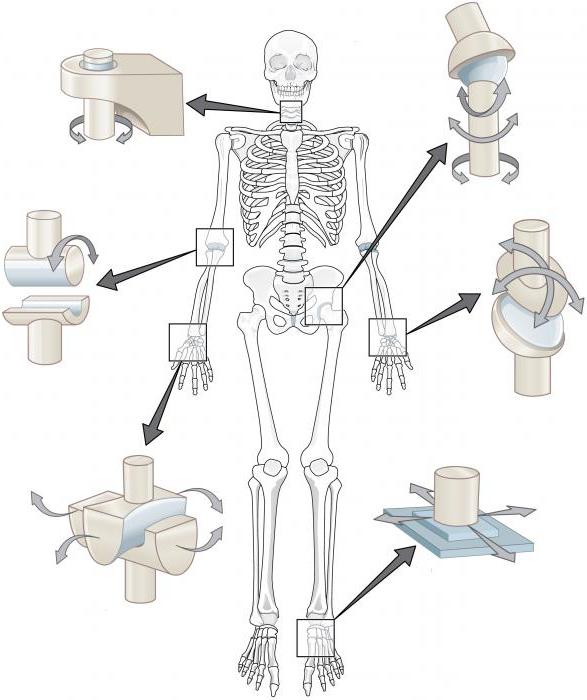
Zaujímavé je, že ľudské kĺby sú všetky hlavné typy kinematických párov opísaných vyššie. Preto je potreba pochopiť procesy, ktoré sa vyskytujú v mechanike.







